CXXRTL, a Yosys Simulation Backend
- The Open Source Simulation Status Quo
- Yosys, the Swiss Army Knife of Digital Logic Manipulation
- CXXRTL, a New Simulation Backend
- Quick Start: From Verilog to Simulation Result
- CXXRTL Manual
- Features and Options
- Disadvantages
- Black Box Support
- Dumping VCD Waveforms
- Design Introspection
- Compilation Options - Speed vs. Debug
- The CXXRTL Code Base
- CXXRTL’s Author
- Conclusion
- References
The Open Source Simulation Status Quo
For my open source RTL projects, I’ve so far only used 2 Verilog simulators: Icarus Verilog and Verilator.
Icarus Verilog is a traditional event-driven simulator with support for most of the behavioral Verilog constructs that
can be found in complex Verilog testbenches: delays, repeat statements, etc. If you can look past its simulation
speed (it’s very slow), it does the job pretty well, and allows one to stay within a pure Verilog environment just
like you would with commercial tools such as VCS, Modelsim etc.
Verilator is a completely different beast: it’s a cycle based simulator that, with some exceptions, only takes in synthesizable RTL, removes all notions of time or delays, and simulates from one cycle to the next. Cycle based simulators are much faster than event driven ones, and Verilator is one of the best in class that routinely beats commercial simulators. Verilator compiles your Verilog design into a bunch of C++ files and then into a linkable library. All you need to do is write a C++ wrapper (which can be very small) that calls the library for each simulation step, and you’re on your way. ZipCPU has a very good Verilator tutorial.
Verilator can be 500x faster than Icarus Verilog. When the simulation time of my projects gets too long, I usually switch from Icarus to Verilator.
Icarus and Verilator aren’t the only open source Verilog simulators, but they are the most popular by far. And for good reason: Wikipedia lists a number of alternatives, but one constant between them is the lack of support for modern Verilog features. I’ve never seen anybody use them…
Yosys, the Swiss Army Knife of Digital Logic Manipulation
Yosys is the star of the open source synthesis world. It initially rose to prominence with the release of Claire Wolff’s Project IceStorm, where it’s the synthesis component of an end-to-end open source RTL to bitstream flow for Lattice ICE40 FPGAs.
But Yosys is much more than that.
It’s a Swiss army knife of digital logic manipulation that takes in a digital design through one of its so-called frontends (Verilog, blif, json, ilang, even VHDL and SystemVerilog for the commercial version), provides tons of different passes that transform the digital logic one way or the other (e.g. flatten a hierarchy, remove redundant logic, map generic gates to specific technology gates, check formal equivalence), and a bunch of backends that write the final design in some desired format (Verilog, Spice, json, SMT2, etc.)
If you have a blob of synthesizable digital logic and you need to perform some kind of transformation, chances are that Yosys already supports it.
Yosys’ commands are relatively well documented, but, unfortunately, the documentation snapshots on the official Yosys website are often woefully behind.
To get the latest and greatest list of commands, it’s best to just compile Yosys and use the help function
from the command line of the tool.
The amount of information can be overwhelming (there are a large amount of commands that I don’t quite understand myself), but, luckily, it’s not necessary to understand most of the commands: in many cases, it’s sufficient to use ready-made recipes to go from RTL to a synthesized gate-level netlist.
CXXRTL, a New Simulation Backend
CXXRTL is a new Yosys backend. It writes out the digital logic inside Yosys as a set of C++ classes, one for each remaining module, after performing whichever transformation pass you want to apply.
In combination with cxxrtl.h,
a single C++ include file with template classes that implement variable width bitvector arithmetic, the C++ classes become a
simulation model of the digital design.
Just like with Verilator, the simulation model is cycle-based. And just like Verilator, you need to provide a thin C++ wrapper that calls these classes to perform a step-by-step simulation.
Quick Start: From Verilog to Simulation Result
Going from Verilog to running a simulation is straightforward.
-
Create an example design
blink.v:module blink(input clk, output led); reg [11:0] counter = 12'h0; always @(posedge clk) counter <= counter + 1'b1; assign led = counter[7]; endmodule -
Convert the design above to a simulatable C++ class
yosys -p "read_verilog blink.v; write_cxxrtl blink.cpp" -
Create a simulation wrapper
main.cpp:#include <iostream> #include "blink.cpp" using namespace std; int main() { cxxrtl_design::p_blink top; bool prev_led = 0; top.step(); for(int cycle=0;cycle<1000;++cycle){ top.p_clk.set<bool>(false); top.step(); top.p_clk.set<bool>(true); top.step(); bool cur_led = top.p_led.get<bool>(); uint32_t counter = top.p_counter.get<uint32_t>(); if (cur_led != prev_led){ cout << "cycle " << cycle << " - led: " << cur_led << ", counter: " << counter << endl; } prev_led = cur_led; } } -
Compile
blink.cppand main.cpp` to a simulation executableclang++ -g -O3 -std=c++14 -I `yosys-config --datdir`/include main.cpp -o tb -
Execute!
> ./tb cycle 127 - led: 1 cycle 255 - led: 0 cycle 383 - led: 1 cycle 511 - led: 0 cycle 639 - led: 1 cycle 767 - led: 0 cycle 895 - led: 1
You can find the files above in the blink_basic
example of my cxxrtl_eval project on GitHub.
CXXRTL Manual
CXXRTL is very new and moving fast. This blog post had to be updated multiple times due to new features being added.
For an up-to-date state of features, it’s best to bring up the CXXRTL manual from within Yosys:
> yosys
...
yosys> help write_cxxrtl
write_cxxrtl [options] [filename]
Write C++ code that simulates the design. The generated code requires a driver
that instantiates the design, toggles its clock, and interacts with its ports.
The following driver may be used as an example for a design with a single clock
driving rising edge triggered flip-flops:
#include "top.cc"
...
Features and Options
-
Flexible Black-boxing of Submodules
This makes it possible to replace any module inside the design hierarchy with a behavior model that’s written in C++.
This can be useful for a variety of reasons during the development process.
-
VCD Waveform Generation
A simulator isn’t worth much when it doesn’t support dumping debug waveforms.
The VCD waveform writer is only around 200 lines of C++ code and serves as a great example for those who want to write similar tools, such as support for different waveform dump file formats.
An example is provided below.
-
Design introspection
Design introspection allows the testbench itself to go through the whole design at run time and discover and interact with all objects that contain a value or state.
The VCD waveform generation uses this feature to come up with all the storage elements (signals, memories) that need to be dumped, but introspection opens up all kinds of other possibilities that are discussed further below.
-
Implementation Simplicity
One of the most attractive points of CXXRTL is the simplicity of the implementation.
The Yosys backend CXXRTL is small. The generated code is understandable (to a point). The execution model is straightforward. It uses a single bit vector data representation and C++ templates to implement Yosys digital logic primitives.
It may not have the performance of Verilator (which has seen more than 20 years of performance optimizations), but if you had to implement some new feature, like adding support for a new waveform format, it’d be trivial compared to adding that to Verilator.
When writing this blog post, I often needed to dive into the code to clarify some details, and other than the complexity that’s inherent to C++ templates, I found the whole experience relatively painless.
I consider this a major plus for an open source project.
-
C API
For those who can’t use C++ for the testbench wrapper, there is a C API that allows pure C to do almost anything you can do with the default C++ interface.
The simulation model itself still needs to be compiled with C++, but this is useful to integrate and link the simulation model into language such a Python (which uses C to call foreign libraries).
-
Automatically benefits from Yosys front-end improvements
Whenever a new front-end feature gets added to Yosys, CXXRTL benefits from that as well.
SystemVerilog is a good example of this: while the pure open source version of Yosys only covers to small subset of SystemVerilog language features, new ones are slowly being added.
Similarly, the ghdl-yosys-plugin project has been working towards adding Yosys VHDL support.
Since all these front-ends compile to the same intermediate data representation that is used by CXXRTL, this improved simulation feature support to automatic!
Once the Yosys gHDL integration stabilize, CXXRTL will be the only open source simulator with mixed Verilog/VHDL language support!
-
Simulation Speed
CXXRTL is orders of magnitude faster than Icarus Verilog.
But see below…
Disadvantages
-
Simulation Speed
My current benchmark is a small VexRiscv CPU running a C program that toggles 3 LEDs.
In the fastest settings, CXXRTL is about 8x slower than single-threaded Verilator.
You can find my benchmarking results here.
One should not rely on just one benchmark, and others have reported simulation speed differences that aren’t as large. Verilog coding style differences, or the type of logic could play a major role here.
My personal opinion is that CXXRTL is fast enough for what I need, and its features and ease of use are sufficient to prefer it over Verilator.
But when speed is your first and foremost concern, CXXRTL is currently not for you.
-
Compilation Speed
A CXXRTL model relies on C++ templates for all data types and operations. It also uses a single storage model for everything, whether it’s a bit, a 32-bit vector, a 1024-bit vector, or a memory. This makes the run-time include file very clean and small.
Meanwhile, Verilator reduces data types to the best matching C storage type. If something can fit in a
char, then that’s what will be used. There are no templates to be seen.Templates are hard work for a C++ compiler. Compilation time is the price you pay.
Furthermore, Verilator splits models into multiple C++ files that can be compiled in parallel. CXXRTL dumps out 1 flat file, so nothing about compiling the model can be done in parallel.
With highest performance flags, my VexRiscv benchmark takes 7s to build with CXXRTL vs 3.5s on Verilator, or about 2x times longer.
When using CXXRTL, it’s crucial to use the right C compiler: while clang9 took 7s, clang6 took 17s, and gcc10 needed a whopping 32s for the same simulation model!
See details here.
The ratio increases for larger models when multiple compilations are launched at the same time.
-
No Support for Some Verilog $ Functions
I like to sprinkle my code with debug
$displaystatements. Since these are non-synthesizable constructs, Yosys currently just ignores them as if they were never there.Verilator keeps them around.
There are hacks possible to do something similar: you could peek from the enclosing wrapper into some lower level hierarchical trigger signal and print out some diagnostics, but that could be a very tall order when your Verilog code has tons of such
$displaystatements.There’s currently a feature request to add support for
$displayin Yosys.Functions like
$readmemare supported, but only the way a synthesis tool supports them: the file with the memory contents is read when Yosys reads in the Verilog file, is then converted into some internal format, and, ultimately, written out as an array initialization in the CXXRTL C++ model.A consequence of this is that changing the memory contents file after running Yosys won’t change the memory content of the C++ model if you don’t go through the lengthy Yosys/C compiler compilation route again. A potential work-around is to initialize the memory contents from the C++ testbench.
Black Box Support
CXXRTL makes it possible to replace any module in the design hierarchy with a behavioral C++ model.
This can be useful for a variety of reasons.
A very good example would be the replacement of a hardware UART with a C++ class that calls the serial port of the computer on which the simulator is running. Doing so allows a software team to connect with a virtual version of the chip just the way they would on real silicon.
Another classic example is to replace a JTAG debug controller with a software bridge to GDB.
And in SOCs, a common simulation speedup tactic is to replace the hardware cycle-true model of a CPU by a behavioral call to the C code that would otherwise need to be simulated assembler instruction by assembler instruction. This can result in huge simulation speed increases for simulations that tests something not directly related to the embedded CPU (and thus doesn’t require the CPU to be cycle or transaction accurate), but still uses the embedded CPU for things like initialization.
An additional treat of CXXRTL is the fact that it supports black-boxing of parameterized Verilog modules through C++ templates, where the Verilog parameter becomes a template parameter. A feature like this could be useful to replace FIFOs with various width and depth with a behavioral model that has extensive debugging capabilities. For example, the behavioral FIFO could log all interesting traffic to a file for later analysis, or maintain an occupancy histogram to help with maximum FIFO depth sizing.
In commercial simulators, replacing design blocks with a behavior model is often a cumbersome process, and one that can slow down the peak simulation speed due to its interference with the scheduling model. The CXXRTL black box implementation does not suffer from this: by adding the right attributes on the ports of the black box model, it can even support combinatorial feedback loops within the black box while still keeping optimal simulation speed.
I don’t think Verilator supports seamless replacement of modules deep in the design hierarchy, so this could be a key feature to consider when choosing a simulator.
I haven’t played with the black-box feature myself yet, but the CXXRTL manual has some examples that will get you going.
The topic of making your black box simulate as efficiently as possible is worthy of a blog post of itself.
Dumping VCD Waveforms
Dumping signal values into a waveform requires knowledge and access to the internal signals and memories.
Design introspection provides all that, and makes it really easy to implement
a simple waveform dumper. CXXRTL comes standard with
cxxrtl_vcd.h
which adds VCD support.
The decision to dump signal values or not after a simulation timing step is up to the writer of the C++ testbench, and requires slightly more effort than for a traditional Verilog simulator, but it’s also more flexible: it’d be trivial to only start dumping waves based on some internal design condition, for example.
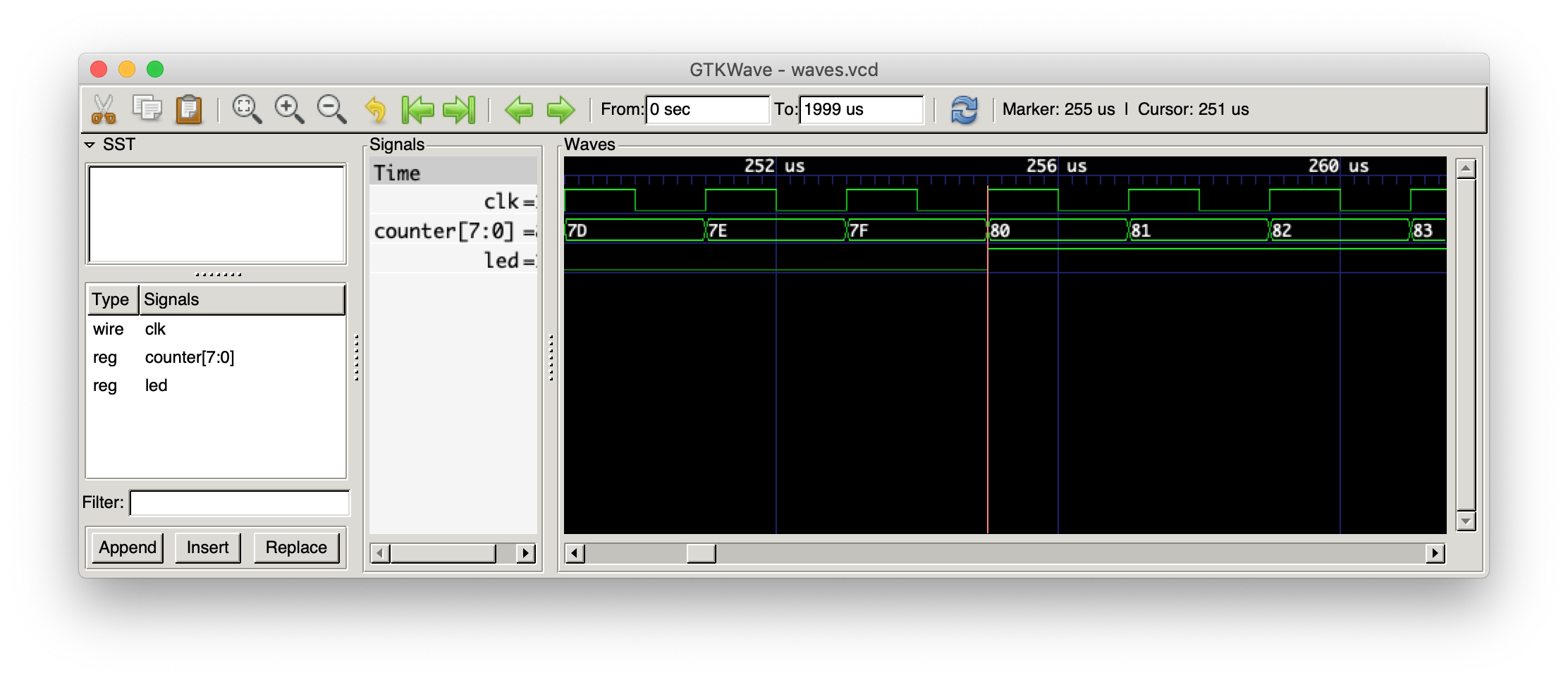
blink_vcd
has a minimal example on how to dump a VCD file. Check
out the comments in main.cpp
for explanations.
If all goes well, you should be greeted with the following image after running make:
Design Introspection
This section talks about a more advanced topic that requires some knowledge about how CXXRTL stores data under the hood. If you’re only interested in CXXRTL as a replacement for your regular Verilog simulator, don’t let this section scare you away: you can safely skip it! Design introspection is something that’s mostly useful for tool makers, not for regular simulator users.
CXXRTL uses C++ objects to store values, wires, and memories across the whole
design hierarchy. These objects by themselves are sufficient to run the simulation,
and a C++ testbench can access these objects by reaching straight into the object
hierarchy by calling set and get methods on the object, as shown earlier in
the blink_basic
example:
bool cur_led = top.p_led.get<bool>();
uint32_t counter = top.p_counter.get<uint32_t>();
This is the straightforward, C++ way to interact with the simulation model.
However, it requires knowledge of the existence of the top.p_led and top.p_counter
objects at testbench compile time.
That’s fine when the whole point of your C++ testbench is to interact with these objects, but there are cases where some functionality of your C++ testbench is generic: something that can be used for different designs irrespective of what kind of signals and memories they contain. (A waveform dumper is an excellent example!)
This is where the CXXRTL debug data structure comes into play: it maps all the known and retained (after Yosys optimization) hierarchical names of the source code to information of hierarchical name (its type such as wire or memory, bit width, …) as well as the current simulation value.
With this debug data structure, the testbench can traverse through the design, look at and interact with all the values that the design contains, all without knowing which values exist at compile time.
This opens up all kinds of possibilities. For example, one could embed a CXXRTL model in a GUI wrapper that allows the user to interactively browse through the design variables, inspect values etc.
Or it could be used for checkpointing, where the state of a long-running simulation is saved to file and restored later on, e.g. to bypass a long simulated initialization sequence that never changes between different test cases.
In the blink_introspect
example, the code below shows how one can list the information of all signals and memories in a design:
void dump_all_items(cxxrtl::debug_items &items)
{
cout << "All items:" << endl;
for(auto &it : items.table)
for(auto &part: it.second)
cout << setw(20) << it.first
<< ": type = " << part.type
<< ", width = " << setw(4) << part.width
<< ", depth = " << setw(6) << part.depth
<< ", lsb_at = " << part.lsb_at
<< ", zero_at = " << part.zero_at << endl;
cout << endl;
}
On my small design, the code above prints out the following:
clk : type = 0 ; width = 1 ; depth = 1 ; lsb_at = 0 ; zero_at = 0
led : type = 0 ; width = 1 ; depth = 1 ; lsb_at = 0 ; zero_at = 0
mem : type = 2 ; width = 40 ; depth = 11 ; lsb_at = 0 ; zero_at = 0
u_blink clk : type = 0 ; width = 1 ; depth = 1 ; lsb_at = 0 ; zero_at = 0
u_blink counter : type = 1 ; width = 64 ; depth = 1 ; lsb_at = 0 ; zero_at = 0
u_blink led : type = 0 ; width = 1 ; depth = 1 ; lsb_at = 0 ; zero_at = 0
u_blink non_zero_lsb : type = 0 ; width = 33 ; depth = 1 ; lsb_at = 11 ; zero_at = 0
Printing the value of a signal is a bit more complicated since it requires understanding how CXXRTL stores values internally. That model is pretty simple: all values are stored in an array of as many so-called chunks needed. CXXRTL uses a 32-bit integer as a chunk. (This might change in the future, but it’s unlikely.)
When your Verilog code has a 5-bit register, it will use a single chunk to store its value. When there’s a 33-bit register, it will use 2 chunks.
Memory content is stored just the same, with multiple values tightly packed in an array.
The function below from the same example prints out the current value of a simulation item:
void dump_item_value(cxxrtl::debug_items &items, std::string path)
{
cxxrtl::debug_item item = items.at(path);
// Number of chunks per value
const size_t nr_chunks = (item.width + (sizeof(chunk_t) * 8 - 1)) / (sizeof(chunk_t) * 8);
cout << "\"" << path << "\":" << endl;
for (size_t index = 0; index < item.depth; index++) {
if (item.depth > 1)
cout << "location[" << index << "] : ";
for(size_t chunk_nr = 0; chunk_nr < nr_chunks; ++chunk_nr){
cout << item.curr[nr_chunks * index + chunk_nr];
cout << (chunk_nr == nr_chunks-1 ? "\n" : ", ");
}
}
}
When the value of the counter is 201, and you run dump_item_value(all_debug_items, "u_blink counter");,
you get the following:
"u_blink counter":
word[0] = 201
word[1] = 0
In the example, the Verilog code declares and initializes mem as follows:
reg [39:0] mem[10:0];
initial begin
mem[0] = 0;
mem[4] = 3;
mem[7] = (1<<33);
end
When dumping the value of the memory, you’ll get this:
"mem":
location[0] : 0, 0
location[1] : 0, 0
location[2] : 0, 0
location[3] : 0, 0
location[4] : 3, 0
location[5] : 0, 0
location[6] : 0, 0
location[7] : 0, 2
location[8] : 0, 0
location[9] : 0, 0
location[10] : 0, 0
You can see how for location 7 bit 1 of the second chunk is set to 1. This corresponds to the
assigned value of (1<<33).
Compilation Options - Speed vs. Debug
While the write_cxxrtl command has quite a number of options, in most cases, you only
have to decide between adding -Og or not.
With the -Og option, CXXRTL will go out of its way to retain most, if not all, signals
that were present in the Verilog. Doing so reduces the ability for some optimizations, and,
as a result, the simulation will be slower even when no waveforms are being dumped.
There are other options that will impact the simulation speed, but for the vast majority of use cases, it’s best to just use the default values.
The CXXRTL Code Base
CXXRTL is surprisingly lightweight. At the time of writing this (Yosys commit 072b14f1a), it stands at around 4500 lines of heavily commented code.
This code includes a manual with description of the various options and some examples, the backend that transforms Yosys
internal design representation into C++ code, the aforementioned cxxrtl.h library for variable length
bit vector operations, as well as a C API and a VCD waveform dumping support.
It’s tempting to compare this against the 105000 lines of code of Verilator, but that’d be very unfair because most of the heavy lifting to create a CXXRTL simulator is performed by the generic blocks of Yosys:
- Parsing Verilog into an abstract syntax tree (AST)
- Conversion from the AST into the Yosys internal register transfer represention (RTLIL)
- Elaboration into a self-contained, linked hierarchical design
- Conversion of processes into multiplexers, flip-flops, and latches
- Various optimization and reduction passes, most of which are optional:
- removal of unused logic
- removal of redundant intermediate assigments
- flattening of hierarchy
- …
All of these are steps that need to happen for synthesis, but they also happen to be useful for a cycle based simulator.
CXXRTL expects a design, hierarchically flattened or not, as a graph of logic operations and flip-flops. Yosys already does that. All CXXRTL needs to do is to topologically sort this graph so that dependent operations are performed in the optimal execution order, for best performance, and write out these operations as C++ code.
CXXRTL’s Author
CXXRTL is the brainchild of @whitequark, a prolific author and contributor to all kinds of open source projects.
Her lab notebook covers a wide range of fascinating topics, from using formal solvers to synthesize optimal code sequences for 8051 microcontrollers, to patching Nvidia drivers to support hot-unplug on Linux, to using a blowtorch to reflow PCBs (because… why not?).
In addition to CXXRTL, she’s the main author of nMigen (a Python framework that replaces Verilog as a language to write RTL), the maintainer of Solvespace (a parametric 2D/3D CAD tool), and she has countless Yosys contributions to her name.
I highly recommend checking out her work, her battles with cursed technologies, and sponsoring her work through Patreon.
Conclusion
It’s still early days for CXXRTL. It was started less than a year ago, and the first merge into the main Yosys tree was only happened in April of this year.
And yet it’s already one of the best open source simulators around. It’s fast, lightweigh, and the easiest by far to extend with new features.
It’s already my default simulator for my hobby projects. Give it a try!
References
My other blog posts about CXXRTL:
Relevant whitequark tweets:
- Initial CXXRTL announcement
- Initial black box support with UART example
- VCD emitter, minimal example of dumping VCD waves
- Size of VCD file compared to Verilator
- C API announcement and example
- C API example using Python
- C API example using design introspection
- Zero-cost CXXRTL debug information thread
- CXXRTL 70% faster
GitHub:
-
CXX initial pull request on GitHub
Contains a number of interesting comments about the underlying philosphy of CXXRTL.
Libre-soc:
Foundational paper about operation scheduling: